Digital Twins
Vision and Discrete Sensors
Digital Transformation
Robotics
Automation, Controls
Awards
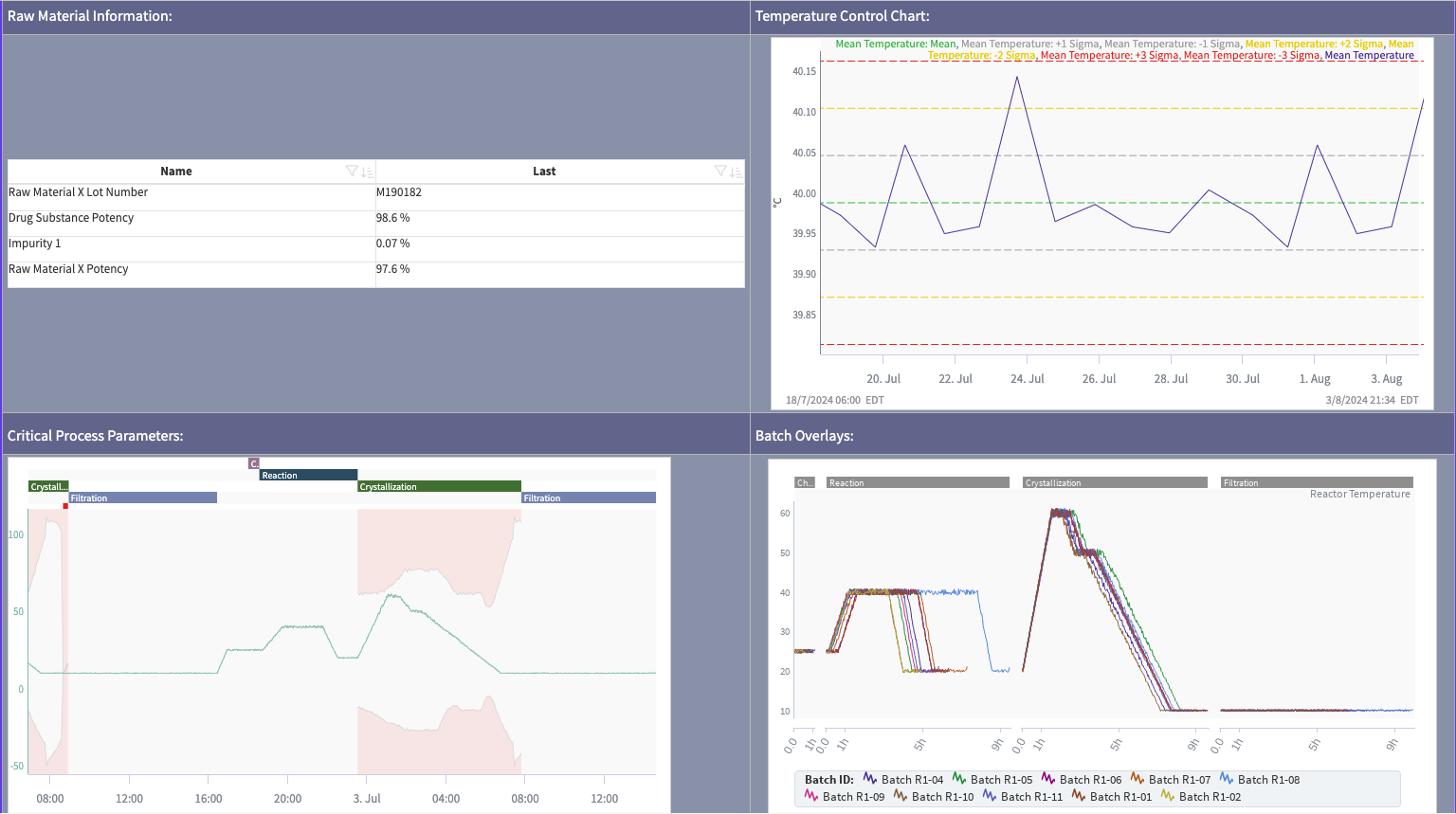
Manufacturing IT, MES
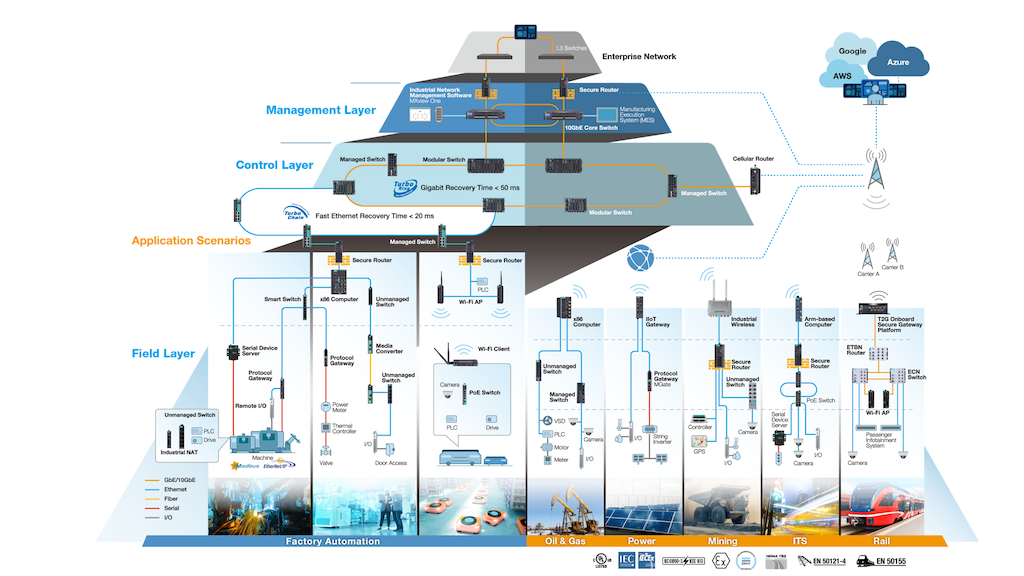
Industrial Networking
IIoT, Industrie 4.0