Automation tales in motion: Great changes have taken place in motion control systems over the past 60 years. From proprietary, “black-box” controllers and early analog drives, electronic advancements have led to today’s largely automated controls that rely on digital signal processors, accurate motor models implemented in software, and ability to connect with other systems in a facility. Four online extensions, with a historical photo gallery, cover more functions and history.
Once upon a time, motion control was largely hardware based. Bulky, proprietary controllers with slow performance compared to that of today were the available offerings. It was a time of magnetic or vacuum tube amplifiers, hard wiring, potentiometer settings, jumper circuits, and numerous separate parts. Still, the perseverance of engineers and designers pushed these limitations toward islands of motion-control automation.
Over time, solid-state electronics, computers, and microprocessors fueled the development of powerful motion controllers. Dramatic improvements in current/voltage shaping and power-switching devices were further drivers of progress. These developments had the objective to improve the control of various types of electric motors that had evolved over the prior 100 years.
Advances took two parallel paths-servo systems and variable-speed drives-directed by application needs and motor type. Demand for high-accuracy motion control by the machine tool industry led to numerical control (NC) machining processes and early use of direct current (dc) servo systems with motor position feedback for error correction. Brushless dc motor servo systems and high-resolution feedback technology were still down the road. Cards and punched tape provided the early means of input to NC machines. By the mid-1960s, computer numerical control (CNC) started to replace NC. Maturing computer technology became permanently linked to motion control by the 1970s. Emergence of microprocessors was soon to follow.
General purpose options
For general-purpose motion control, early interest also centered on brush dc motors because of simpler speed and torque control versus alternating current (ac) motors. However, the trade-off was between more costly and complex dc motor construction-mechanical commutator (phase-switching device) and carbon brushes-compared to simpler, less costly, yet more difficult to control ac induction motors. Electric motors’ influence on motion-control advancements is further explored in a separate online extension (Ref. 1).
Early ac variable-speed drives (VSDs) ran only in open loop due to difficulty in implementing more complex controls. However, developments in motor control algorithms made VSDs increasingly capable. Several VSD control variants have emerged from open to closed loop (Ref. 5). Field-oriented (flux vector) control, developed at Siemens in the early 1970s and perfected over the next decade, enabled ac VSD performance able to compete with dc drives in many applications (Refs. 6, 7, 8, 9).
Meanwhile, dc variable-speed drives didn’t disappear despite periodic predictions to that effect. They have benefited from technology advancements along with their ac VSD counterparts (more at Ref. 3).
Below, ac/dc drives are discussed within a broader view of motion-control technology.
Software, hardware progress
With powerful digital signal processors becoming available, more sophisticated motion control could be implemented in software and hardware. These methods included pulse-width modulation (PWM), direct torque control-patented by ABB in the mid-1980s and first marketed in VSDs in 1995 (Refs. 10, 11)-more accurate motor models, modern PID (proportional, integral, differential) control, and other servo control algorithms. Ability to simulate motion systems in software before building hardware has also become a useful tool (Refs. 12, 13, 14). Rockwell Automation (RA) mentioned the power of mechatronic design software as a way to optimize performance, efficiency, and size of motion control solutions. "This contrasts with prior analysis required to right-size system components so time intensive that it proved prohibitive," said Paul Whitney, commercial program manager – Integrated Architecture, at RA. Whitney cited the company’s Motion Analyzer as a tool that allows engineers to evaluate trade-offs among materials, size, and safety of components, and available motion systems-and even analyze energy costs.
Semiconductors played a major role in advancing motion control. By the 1960s, silicon controlled rectifiers (SCRs) and integrated circuits had emerged for motor drives. Bipolar junction transistors and gate turn-off thyristors (GTOs) followed in the mid-1970s to handle power switching, current/voltage shaping, and the beginnings of electronic commutation. Then in the late 1980s, insulated-gate bipolar-transistors (IGBTs) revolutionized VSDs, offering higher switching speeds at low losses. Additional power semiconductor types were developed particularly for the higher power needs of medium-voltage drives. An interesting timeline of developments appears in Ref. 15, p. 43.
Ultimate motion control
Electric servo systems have developed into the most accurate motion control method available today. Servos deliver rapid loop closure for dynamic positioning response in numerous applications. High-resolution feedback from the motor is key to achieving such performance. Microprocessor power further allows newer-generation servos to add sophisticated functions, for example, synchronize controllers for multi-axis control (Refs. 16, 17, 18, 19).
Yaskawa America Inc. verifies the amazing technological advancement of electronics since the first fully digital servo amplifiers entered the marketplace in the early 1990s. At that time typical feedback resolution on a servo motor was 1,000 counts/revolution (cpr) and frequency response was in the 250 Hz range, according to Scott Carlberg, product manager, Yaskawa America, Drives & Motion Div. "Today’s servo systems are being designed to handle feedback resolution in excess of 16 million cpr with frequency response surpassing 3 kHz," Carlberg said. Increased speed and processing power of microchips has led to breakthroughs in servo performance, allowing controls engineers to create innovative functionality-for example, to greatly simplify the commissioning process and overall machine performance.
"Some of the more sophisticated servo systems available today come equipped with adaptive tuning algorithms that automatically and continually adjust servo tuning gains to optimal levels regardless of changes in load inertia or move profiles," Carlberg stated. "This type of advanced functionality eliminates the ‘black magic’ that has historically been associated with servo tuning."
Suppressing vibrations
Yaskawa cited vibration suppression as another recent advancement coming from high-power microprocessors available today. Servo systems with this type of functionality can detect different types of machine vibrations detrimental to performance and life of mechanical transmission parts using the high-resolution feedback device. An algorithm in the amplifier adjusts the motion command to cancel out specific frequencies of vibrations detected, thus eliminating the problem.
"All of this happens automatically. The user is left with a quicker, quieter, and more efficient machine cycle," Carlberg added.
Mitsubishi Electric Automation Inc. also noted huge advancements in feedback devices. "Encoder resolutions have gone up 1,000-fold over the past few years. With older quadrature encoding, servo motors were limited to either high speed or high resolution," said Bryan Knight, automation solutions team leader at Mitsubishi. "The latest generation high-resolution encoders overcome the challenge of reliably counting pulses beyond a few megahertz in noisy industrial environments." It’s done using better electro-optical systems and encoding patterns in the encoder along with high-speed serial communications to the servo drive.
This combination approach allows synchronizing the encoder clocks with the servo drive and motion network. Thereby, feedback data from each servo axis can be reported at exactly the same time for high axis-to-axis synchronization. Fast, accurate, synchronized motion is critical in printing and converting, among other applications.
Besides increased position and synch accuracy, higher feedback resolution yields smoother, more accurate velocity information, according to Knight. "Better visibility of what’s happening at the motor, combined with faster signal processing and innovative algorithms have all but eliminated the need to manually tune a servo drive." Tuning has been a complication for servo systems in the past. New data availability brings an added benefit: real-time analysis of vibration, resonance, inertia loads, and energy consumption.
"Valuable preventive maintenance and diagnostics information is obtained to minimize downtime and optimize maintenance intervals for the system’s mechanical components," Knight said.
Mitsubishi Electric likewise recognizes the tremendous increase of processing power in motion controllers over time, resulting in ever faster control response in machine systems. However, Knight cautioned that there is a limit to how fast machines will operate. "This extra processing power isn’t going to waste, though, Knight said. "Users no longer have to compromise between writing either complicated code hand optimized for maximum performance or readable code for easier troubleshooting." Extra processing speed allows motion programs to use modular programming techniques and reusable function-block libraries to ease program development and simplify in-service machine troubleshooting.
MR-J4 servo drives and motors represent a prime example among various motion control products from Mitsubishi Electric.
One control platform
Historically, engineers were forced to use multiple controllers to satisfy a mix of discrete, process, drive, safety, and motion control functions found in most manufacturing environments, according to Rockwell Automation’s Whitney. This meant a PLC for discrete control, a motion controller for multi-axis control, and a distributed control system or loop controller for process applications.
"It proved to be time-consuming and costly for individual integration of each controller. Today’s programmable automation controllers (PACs) are able to handle all these applications from a single control platform," Whitney said, citing Rockwell Automation’s Logix Control platform as an example. The result is faster startups through reusable programming tools, lower maintenance costs from reduced spare parts (and fewer maintenance people), and better information sharing among applications to satisfy plantwide control needs, Whitney explained.
"Converged network infrastructure" able to connect various applications was another driver of progress noted by RA. In the past, OEMs built equipment using separate network technologies for discrete (or safety) applications and for motion control. Today, machine builders can provide real-time information using one streamlined network infrastructure. EtherNet/IP serves as one network without "need for a dedicated motion or safety network," Whitney continued. "As a topology, motion control can be placed anywhere in the infrastructure without physically isolating traffic from other forms of traffic on the wire. This provides more design flexibility and less maintenance issues during commissioning and deployment."
Decentralized architecture
An unlikely marriage of two disparate technology environments-motors and controls-was consummated in the mid-1990s. This combination product was commercialized along parallel lines, uniting induction motors with VSDs operating in open-loop and servo motors with drives in closed-loop packages. Example applications are in conveyor controls (first case) and packaging machines requiring coordinated motion (second case), explained Craig Nelson, product manager at Siemens Industry Inc., Drive Technologies, Motion Control. Power ranges up to around 7.5 kW and 4 kW apply to the above two cases.
Nelson regards the decentralized approach as an important, newer development in motion control. Today’s second-generation products are superior to niche products available earlier. They offer several advantages as outlined below. (See more background coverage at Ref. 1, below.)
Degree of integration varies with system design. General-purpose (induction motor based) systems are more integrated with all functions and hardware mounted on the motor or machine. The migration to drive-based machine safety function also fits into the decentralized design.
Meanwhile, servo motor based systems are trending toward a hybrid design, according to Nelson. This means microprocessors, application-specific integrated circuits (ASICs), and other electronics remain in the controlled environment of a central cabinet, but the drive power devices mount on the servo motor.
"With this approach you still have the main advantages of a decentralized solution (short motor cables and smaller control cabinet with less heat) but more sensitive electronics are better protected," Nelson added.
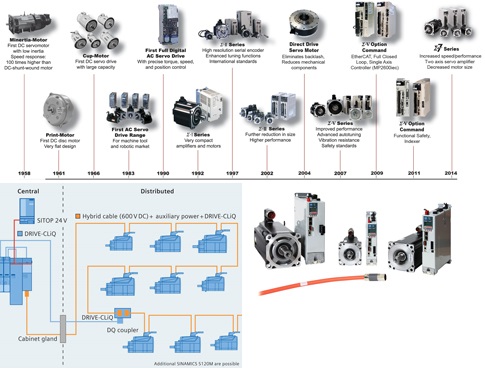
Siemens’ Sinamics S120M uses the hybrid approach and also benefits from the single cable approach that drastically reduces total drive system wiring (see Figure 2). The architecture further places ac to dc power conversion in the central location and transports dc voltage across the hybrid cable. This creates a common dc bus system allowing power sharing across the motor drives.
Action along the way
In the last 15-20 years various other developments have enhanced the capabilities of motion controllers and electric drives. Among them are the following, with further coverage in an online extension (Ref. 2):
- Multiple control modes in one drive selectable by software
- Miniaturization of controllers and drives
- Chip-based motion control, an option for some applications
- Integrated safety.
Motion control technology continues to move inexorably forward. Still higher system performance remains the main objective, while new advancements add diagnostics, data communication, and user-friendly functions. Continued action along the way can help motion control to live on happily ever after.
– Frank J. Bartos, PE, is a Control Engineering contributing content specialist. Reach him at [email protected]
Key concepts
- Motion control systems have changed rapidly over the past 60 years.
- From early proprietary, "black-box" controllers and early analog drives, electronic advancements have led to today’s largely automated controls.
- Motor and motion controllers use digital signal processors, accurate motor models implemented in software, and ability to connect with other systems in a facility.
Consider this
Are your motion control platforms scalable and flexible enough to adapt to tomorrow’s needs or so complex and undocumented that no one ever upgrades them?
Online extras
This article includes links to much more on motion control development, including an extensive motion control photo history from the Control Engineering archives, including the magnetic servo amplifier shown, Control Engineering, December 1954. See below for the related stories.
– Motors’ influence, Ref. 1, electric motors’ influence on motion-control advancements
– More motion developments, Ref. 2, motion controllers and electric drives
– From the archives, a motion control photo history, Ref. 3, 1954 to present
– Compendium of references, Ref. 4, on electronic motion control
Also see:
https://us.mitsubishielectric.com
https://usa.siemens.com/motioncontrol
www.yaskawa.com



