Inside Machines: Encoders and speed sensors play a critical role for many motion control applications, such as industrial test and measurement, automation, security and surveillance systems as well as many other applications.

When design engineers use the term "motion control," the first reaction may be to think of high-speed systems with rapid changes in direction and speed. High-speed and highly dynamic motion control applications have technical challenges, but this is also true at the other end of the spectrum with very slow speeds. Tight control of slow speed is an important issue for many motion control applications, such as industrial test and measurement, automation, and security and surveillance systems.
In applications today, it is not uncommon for high zoom optical systems to focus clearly on a target object 20 km away. When that distant target object moves, things start to get tricky because the field of view is limited, and the target will quickly disappear from view if it is not followed smoothly.
If the target is moving at 20 km/hr at a range of 20 km this equates to a rotational speed of 0.05 rpm-extremely slow, in other words. To keep the target within the user’s central field of view, this low speed needs to be controlled accurately and responsively as the target object’s speed and direction changes. To maintain a central position in the field of view, equivalent to 0.3 m at a range of 20 km then >200 k encoded points are required or 18 bits of encoded position. To maintain smooth motion 20 bits is required, four times more than the example mentioned.
The traditional approach would be to use an encoder on the system’s drive motor and to multiply its counts per rev through a reduction gearbox connected to the motor. The higher the gear reduction, the greater the multiplying effect. This also means a greater amount of backlash and a less responsive servo system overall. Such a system would have limited dynamic range and typically would be unable to track a quickly moving object at modest distances of less than a kilometer, as it would lack the required performance at higher rotational speeds.
The alternative, more modern approach is to use a high-resolution position encoder on the output shaft of the gearbox, which helps avoid backlash effects while maximizing the servo’s dynamic performance. This approach has only recently been more widely adopted because high-resolution encoders have been prohibitively expensive.
Traditional high-resolution position encoders
Multi-speed resolvers, precision optical or capacitive encoders have traditionally provided high-resolution (>18 bits) position sensing. Precision resolvers are expensive and can present packaging problems due to their bulk, weight, and precision installation tolerances to engineers. Similarly, high-resolution optical ring or capacitive encoders also are expensive and also require precision mechanical installation. Unlike resolvers, which are usually very robust, optical encoders offer limited resilience to shock or vibration (due to their use of glass scales), and their operating temperatures are limited. Optical and capacitive devices suffer reliability problems from foreign matter, such as dust or condensation. High-precision optical devices are particularly susceptible to foreign matter because they use fine optical gratings to attain the high number of counts per revolution. Their absolute position output can be thrown off by particulates whose dimensions approximate the features of the optical grating.
Next-generation inductive encoders
Because traditional high-resolution position sensing techniques have limitations, design engineers are turning to a new type of sensor. The sensors may be thought of as a new generation of inductive encoder that offer especially high-resolution measurement of up to 4 million counts per rev (22 bits). Inductive encoders use the same basic physics as resolvers, and this allows them to offer high resolution, noncontact measurement in tough operating environments. Operating in reliably in dirty or wet environments allows the design engineer to eradicate the seals, bushes, or O-rings required to protect optical or capacitive encoders.
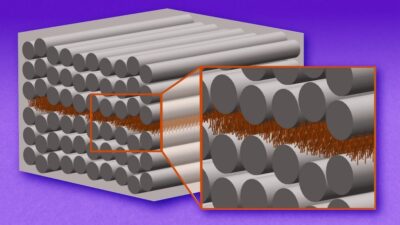
Rather than the traditional wire wound transformer constructions found in resolvers, encoders use printed circuits as their principle components. This provides a further advantage in form factor, low axial height, and a large bore. The design makes it easy for cables, shafts, and pipes to pass through the middle of the sensor. Encoders offer a simple electrical interface featuring a dc supply and an absolute, digital output.
Mark Howard, general manager, Zettlex UK Ltd. Edited by Chris Vavra, production editor, Control Engineering, [email protected].
MORE ADVICE
Key concepts
Tight control of slow speed is an important issue for many motion control applications, especially those that involve monitoring great distances.
Inductive encoders are a next-generation solution that offers high-resolution, non-contact measurement in tough operating environments.
Consider this
What other developments could be made for encoders designed to monitor and capture motion control?
ONLINE extra
Zettlex UK Ltd.
www.zettlex.com
See additional stories about motion control and sensors linked below.