Inside Machines: Model-based control results in robotic systems moving faster and more accurately, with greater throughput. Such modeling can estimate torques and forces on the robot during movement and prevent excessive torque, increasing robot speed, reducing oscillations, and settling times.
Dynamic modeling of robotic manipulators has been a known methodology in academic circles for many years. It commonly serves as a tool in robotics and engineering laboratories for research and development of humanoid robots and advanced control algorithms, motion simulations, and other academic pursuits. Dynamic modeling involves the development of mathematical formulas that describe the dynamic properties of the robot-inertia, mass, center of mass, and other characteristics that cannot easily be measured. Although frequently seen in theoretical research, the application of dynamic modeling to improve robot control has been mostly overlooked by developers and manufacturers of industrial robots.
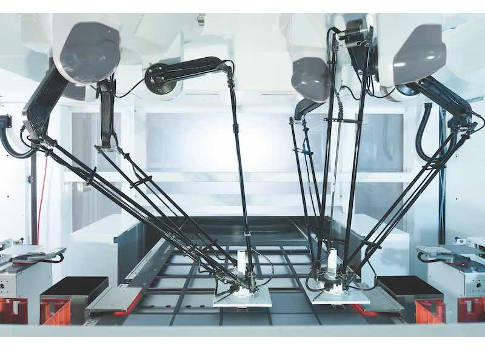
Potential of dynamic modeling was considered to resolve performance issues experienced by a manufacturer of high-speed delta robots used in the semiconductor industry. The solar wafer handling applications in which the robots were employed demanded high acceleration and extreme precision. With its inherently fragile structure, the delta manipulator was highly susceptible to breakage. Moreover, it posed the threat of impacting and damaging expensive loads and production materials.
Reduce risk of robot damage
The study of delta kinematics is based on mechanical parallelograms connected by ball-joints, in some systems, to the moving platform and the arm links. If certain positions or angles are exceeded, the force needed to break apart the robot decreases drastically, and the robot can easily disassemble if a collision or strong jerk occurs. To further complicate this scenario, these breaking points are typically at an outstretched position, where there is a strong risk of hitting an obstacle. If an impact is left undetected after the robot breaks, the potential for even more damage increases.
To overcome these disadvantages and provide better control of the delta robot, engineers adopted and enhanced a dynamic model whose origins were rooted in academic research. The resulting model, or set of algorithms that describe the delta robot, is only half the story.
The model is generic. Actual parameter values vary because robots have different size and mass. Although the robot kinematics is the same, physical properties are different. Even in a manufactured series, the physical properties of each robot may vary slightly and affect performance differently for each robot.
Once the robotic system has been modeled, accurate values of the dynamic parameters need to be obtained. This was achieved by developing additional algorithms and a process for automatic identification of kinematic and dynamic parameters.
While some parameters, such as the geometric dimensions of the robotic arm links, are easily measured and inserted into the formula, other parameter values, such as the center of mass of each link, are determined by the automatic identification process.
During the identification process the robot is moved randomly, and the values of the dynamic parameters are determined by identification algorithms. Internal and external factors, such as shape, material, cables, and friction, are figured into the calculations.
As a result of the success achieved with model-based control of delta robots, dynamic models were developed for other types of robots, such as selective compliance assembly robot arm (SCARA) robots, 4-axis traverse arm robots, and a 5-axis spherical robot. Dynamic modeling resolves an ever-growing demand for greater output, faster speeds, and lower costs.
Better motion control
Using the dynamic models, customers have achieved faster settling time and better trajectory-following motion control. A side benefit is the detection of wear and tear on the system through changes over time in mechanical parameters, particularly the friction constant.
Model-based control is now an embedded feature in some multi-axis controllers. Its effectiveness is ultimately achieved through a real-time motion bus system. A deterministic Ethernet protocol allows the multi-axis controller to update drive values every millisecond. In each sample, the logic device sends and receives from the drive commanded and feedback torque values, along with standard position and velocity values. The multi-axis control is typically coupled with a servo drive, which can be configured to receive torque as an additive value, as a supplement to the torque it computes on its own.
The immediate benefit of model-based control, as seen in the case of the delta robot, is impact detection and avoidance. Load and workspace, as well as human operators, are better protected. Moreover, model-based control eliminates the need for force sensors, thereby simplifying system design and reducing costs.
Optimized paths
The most significant benefit of this control method is enhanced robot behavior and drive performance. Paths are highly optimized since the torque required to reach positions can be calculated and controlled with greater accuracy. The required current is smoother, as it is computed and not simply obtained by a feedback loop, giving better speed control and reducing jerks and spikes.
Estimation of torques and forces on the robot during movement and the prevention of excessive torque allow robot speed to be increased easily and safely, while oscillations and settling times are reduced. Model-based control results in robotic systems moving faster and more accurately, with greater throughput.
Mirko Borich is softMC project manager, Servotronix Motion Control; edited by Mark T. Hoske, content manager, Control Engineering, CFE Media, [email protected].
MORE ADVICE
Key concepts
Robots can move faster and more smoothly when model-based algorithms help predict need response based on speed, load, robot type, and position.
Robot paths are optimized using dynamic modeling.
Models with smooth movement reduce wear and maintenance.
Consider this
Smarter software can increase throughput and reduce robot maintenance.
ONLINE extra
Also learn how drive software can suppress vibration in a related article linked below.
For more on robotics, see www.controleng.com/robotics.



