Manufacturing IT, MES
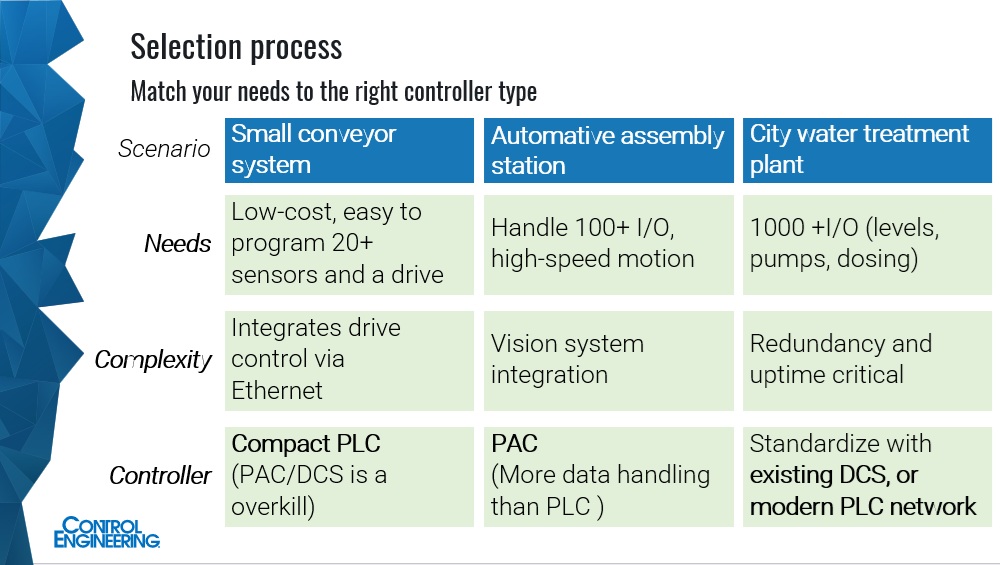
Controllers
Workforce Development
Automation
The Downtime
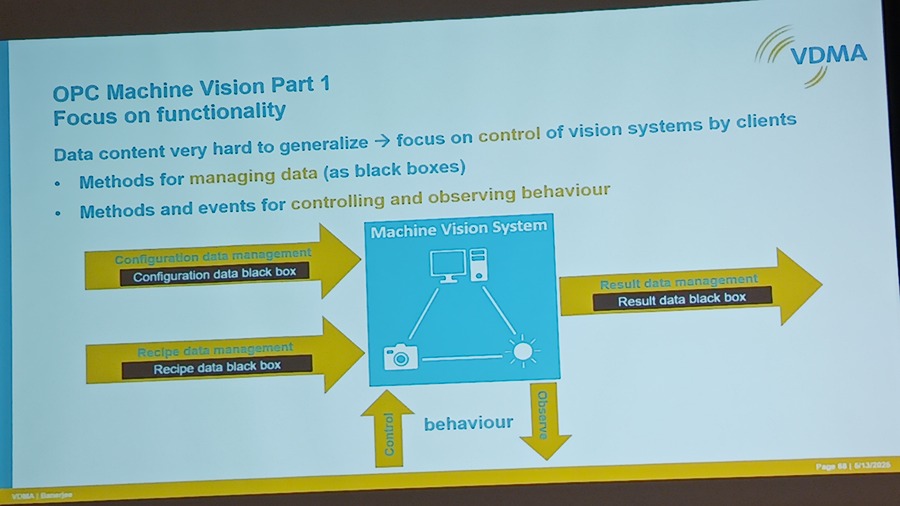
Vision and Discrete Sensors