If tools aren’t enabling more flexibility in use and expansion of robotics, then we need better tools. That’s what’s behind the ROS-Industrial effort from Southwest Research Institute (SwRI). How does setting up a factory in a day sound?
Robots should be easier to use for more applications, and Southwest Research Institute (SwRI) established ROS-Industrial, an open source industrial robotic software and working group, to broaden the application of robotics and increase robotic interoperability. ROS stands for robotic operating system. A Dec. 5 quarterly community meeting, held online and on the phone, is summarized below, including information about setting up a factory with robotics in one day. The open forum discussed the general direction of the ROS-Industrial program, reviewed new robotic technologies, and publicized the work and the needs of the community. All are invited to these meetings, though developers and end users are the target audience. About 60 people attended.
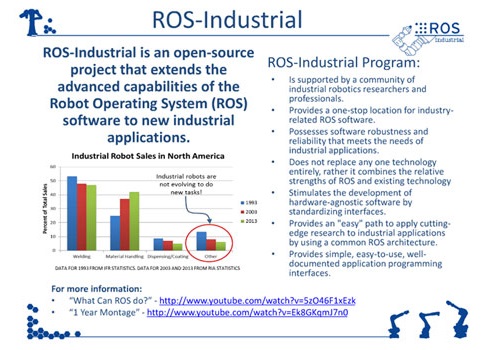
Shaun Edwards, SwRI senior research engineer, robotics and automation engineering section, said robots should be doing more than two or three tasks, referring to the slide using Robotic Industries Association (RIA) statistics. The ROS-Industrial program goal is to broaden robotics into other applications with standard robotic interfaces and extended capabilities of the Robot Operating System (ROS), he said. Two YouTube videos help explain efforts; see links below. Citing statistics from July, Edwards said contributors to the program include more than 30 developers and bug finders, and for the approximately 100,000 lines of code, 27% are comments, showing that it’s well-documented code.
“What we want is to limit the number of skills needed to program ROS-Industrial.”
A good step in that direction is BRIDE, said Edwards.
BRIDE is a compound, multi-lingual acronym, standing for BRIC (German: best practices in robotics) and IDE (integrated development environment). BRIDE provides a framework for meta-model definition and transformation in the Eclipse platform, using the BRICS component model. At present, it supports Orocos and ROS.
Alexander Bubeck, project manager for industrial engineering in the Fraunhofer IPA robotics group, described BRIDE as a toolchain for model-based software development. Current challenges in software for industrial and service robotics include lack of reuse and need to create more understandable code, promoting wider use of standards and best practices; shorten learning curves; speed releases of the next version; and allow distributed development. ROS did a great job in lowering the learning curve for robotic programming, but adding model-driven engineering would streamline efforts, Bubeck said.
Software engineering for robotics would be better served by creating a model-driven engineering (MDE) component framework with layers, from components at the bottom to model of classes, meta models (currently served by UML, unified modeling language), and above that a meta-meta-model layer (theory). Purpose is to separate concerns such as computation, communication, coordination, and configuration in programming, eventually allowing investments in code to be portable among manufacturers, he suggested. [Example: Some manufacturers offer software libraries, but software components that describe the same functions cannot be reused across platforms and must be rebuilt. Imagine how much more expensive building a house would be if lumber, pipes, wires, windows, and appliances were all engineered with custom specifications for each house.] Error handling will be integrated into the next version, Bubeck added. Learn more about these efforts to help with reuse and modification of robotic code.
Best of Robotics
Other news about related work in progress from those presenting:
Eric Marcil, senior project engineer, Yaskawa America Inc., Motoman Robotic Division, said that his company’s interface to ROS released earlier this year will be updated to include the Motoman dual arm robot, with release expected in the first half of 2015. www.motoman.com
Joe Spanier, automation engineer at Caterpillar Inc., seeks easier point creation in MoveIt!, a ROS application for motion planning. Also useful, Spanier said, would be more ROS drivers, for laser scanners for instance, which would save time by eliminating the need for touch sensing in robotic welding applications.
Jason Michel Lambert, research office, robotics and automation, with Canada’s National Research Council, is working with ROS in relation to hardware in the loop and fast prototyping. He expressed interest in a real-time interface and is working with Kuka and Comau robots to bring ROS closer to plant-floor applications.
Gijs vd Hoorn, researcher, Delft Robotics Institute, Technical University Delft, The Netherlands, said that Delft supports the Fanuc stacks, MoveIt! configurations, and kinematic plug-ins. Future efforts will include improving the Fanuc driver, and expanding support to additional manufacturers and input/output (IO) devices. With joint torque and tool force feedback, supported by some robots, ROS would work with more applications assembly and grinding.
Florian Weisshardt, Fraunhofer IPA, described the Factory-in-a-Day effort from the European Union, now with more than 18 partners, and more than 8 million Euro budget. The project goal is to develop technologies and business models to reduce factory installation time and related costs from months to one day. Possible timeline follows.
First, analyze workflow, then design custom components for the job, and print 3D components. At 8 a.m. ship everything to the factory. 10 a.m. unload and begin self calibration. 12 p.m. Instruct and teach. 4 p.m. finished.
To lower time, effort, and cost, an integrated tool chain is needed to develop, test, install, and deploy robotic software components. A working prototype is planned for June and a first prototype in October, with an October 2015 target for the final version, Weisshardt said.
Brian O’Neil, a postdoctoral research associate with Los Alamos National Laboratory, www.lanl.gov seeks to advance automated assembly situations where parts are not fixed ahead of time or when parts are not perfect.
Simon Jansen, representing a team of three at Alten Mechatronics, www.alten.nl is working on a graphical user interface to make ROS usable for industrial operators beyond ROS developers, with release expected early in 2014.
Kelsey Hawkins, a robotics PhD student at Georgia Tech, www.gatech.edu is working on a driver for Universal Robot that would allow the robot to operate using a faster control loop, 125 Hz. ROS provides an interface to manage the new control loop wrapper, without the need to bring down the robot to test the new controllers.
Shaun Edwards, SwRI, said those taking a survey in October have prompted better ROS-Industrial tutorials, documentation, training materials, and code review.
Clay Flanagan, manager of robotics and automation section of SWRI, thanked participants.
– Mark T. Hoske, content manager, CFE Media, Control Engineering, [email protected].
ONLINE
See this article for more about ROS-Industrial.
ROS-Industrial videos on YouTube:




