Video: Multiple robots can be operated within one open-source programming environment, explains Shaun M. Edwards, senior research engineer, robotics and automation engineering section, Southwest Research Institute.
Video: ROS Industrial, an open-source industrial robotics package, was used to program and illustrate the robots used in this demo at Automate 2013, as explained by Shaun M. Edwards, senior research engineer, robotics and automation engineering section, Southwest Research Institute (SwRI), an independent, nonprofit applied research and development organization. ROS stands for robot operating system. In the short video, Edwards said the software enables advanced industrial automation applications.
Increasingly, robots are being considered for use in dynamic environments where perception capabilities are involved and the environment is constantly changing. The robot must act intelligently to avoid collisions and other things that might damage robots or people, or things in its environment. These capabilities aren’t met by off-the-shelf products, said Edwards, which is the reason for forming ROS Industrial Consortium (RIC).
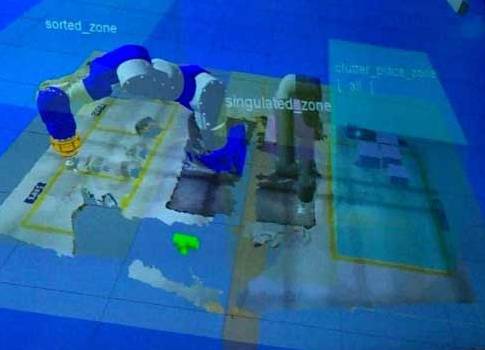
In the demonstration, Edwards explained, two small robots, Motoman SIA20D and Universal Robots UR5, use 3D perception to identify objects on the table in front of them, figure out how to pick them up, and then place them where they need to be. The UR5 is working on a clutter pile, typically very difficult for robots to sort and pick up. The SIA20D recognizes the parts selected from the UR5, selects the part, and puts it where it needs to be. Many industrial applications can use this functionality, for bin picking or other dynamic applications.
The “cool” on-screen depiction shows what the robot sees and what each is thinking. From a development standpoint, it allows the user to create something very complex, see all associated data, robot location, computer-aided design (CAD) data, representations of the robot cell, and 3D information all in one environment, with debugging, to ensure the programs are robust.
RIC is seeking industry’s help to learn more about advanced robotic needs, then wants to work to help meet those needs. The open-source ecosystem envisions involving end users, system integrators, open-source developers, educators and nonprofit organizations, government, R&D collaborators, and robot suppliers. As the consortium’s site says, “envision a world where industrial robots use a common software language, where reduced integration costs fuel growth in advanced manufacturing, where industrial automation enjoys the same exponential rate of progress as computers and mobile devices.”
– Mark T. Hoske, content manager, CFE Media, Control Engineering and Plant Engineering, [email protected].




