Researchers at the University of Waterloo developed a musculoskeletal model of the human arm that provides the human action for an upper limb rehabilitation robot.
An emerging area of research is the use of musculoskeletal models to study human movement, making them an appropriate tool to interact with rehabilitation devices in simulations. Rehabilitation robots are now being used clinically, but because of emerging proposals for motor learning there is still much that can be done to improve the designs and control algorithms of these robots. One of the neglected aspects in designing and the development of rehabilitation devices is the modeling of human interaction with the robot.
Borna Ghannadi and Dr. John McPhee, researchers at the University of Waterloo developed a musculoskeletal model of the human arm that provides the human action for an upper limb rehabilitation robot using MapleSim software from Maplesoft. The controlled robot is tested in partnership with the Toronto Rehabilitation Institute (TRI) and Quanser Inc.
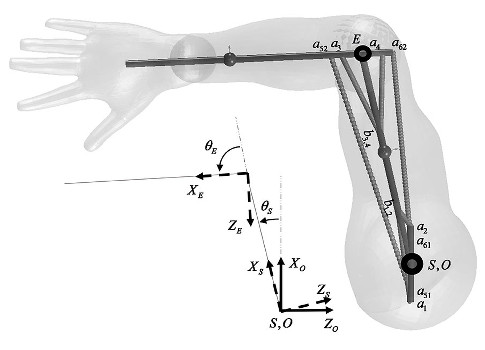
The TRI/Quanser robot is an end-effector based planar robot, which performs reaching movements in the horizontal plane for therapy of the shoulder and elbow. The team decided that a fitting starting point was to develop a simplified planar 2D musculoskeletal arm model which consists of two hinged links and six muscles, and assumes no tendon compliance.
The team developed an impedance controller that can automatically adjust itself in a variable admittance environment, representing the variable levels of movement disorders affecting rehab patients. The controller was simulated running on the 2D model, in 4 different modes. The first two modes, simulating a healthy arm, were then used to calibrate and tune the controller while the second two modes, which simulated a post-stroke patient’s arm, were used to evaluate its performance.
Hand position error and muscle activation levels were measured and compared during simulation runs in the different operating modes. The results were positive, and in line with expectations, demonstrating that it is possible to use musculoskeletal arm models to evaluate the planar robot.
During the next phase of the project, the team plans to develop an advanced 3D musculoskeletal arm model with integrated muscle wrapping. As musculoskeletal models become more detailed and life-like, engineers can enhance the design of control algorithms for upper limb rehabilitation robots, which ultimately improves the rehabilitation process for post-stroke patients.
Maplesoft
– Edited by Chris Vavra, production editor, Control Engineering, CFE Media, [email protected]. See more Control Engineering robotics stories.



