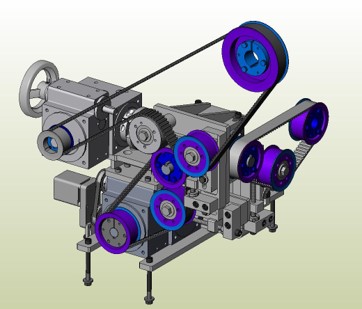
Mechatronics and Motion Control
Motors and Drives
Automation, Controls
The Downtime
AI and Machine Learning
Inductive Automation
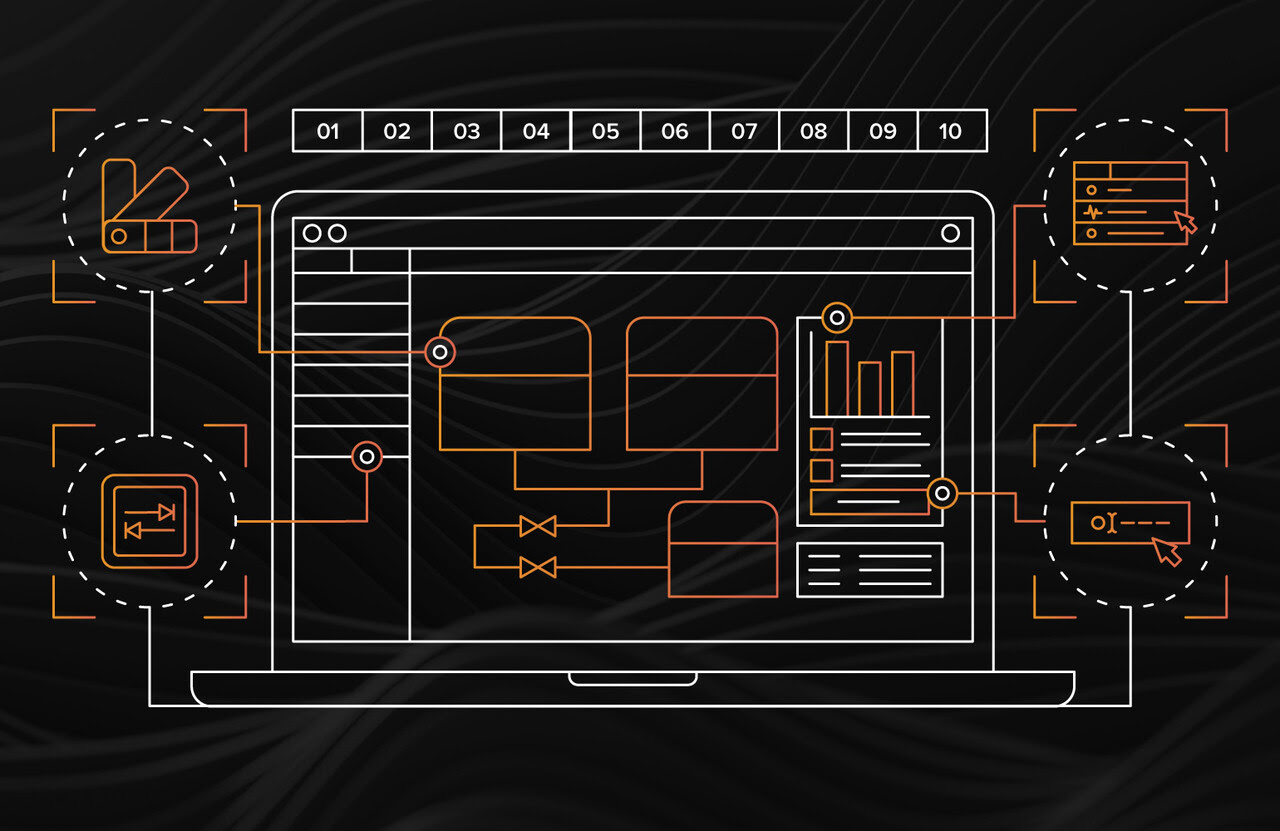
Digital Twins