Size a variable-speed drive (VSD) for the application, and ask if a general-purpose drive will do or if more embedded intelligence is needed. Do you need a VSD, variable frequency drive (VFD) or adjustable speed drive (ASD)? (Trick question)
Learning Objectives
- Size drives – adjustable speed drives (ASD), variable speed drives (VSD), variable frequency drives (VFD) – for the motor.
- Users must always confirm the motor full load amps rating and ensure it is less than or equal to the drive’s full load amps rating.
- Matching the drive with the motor’s application will lead to a better run drive-motor system.
Size the drive appropriately for an application. Also ask if a general-purpose drive will suffice, or if a drive with more embedded intelligence would fit the application? Set-up and troubleshooting advances will help too.
How to specify an ASD, VFD, VSD, inverter
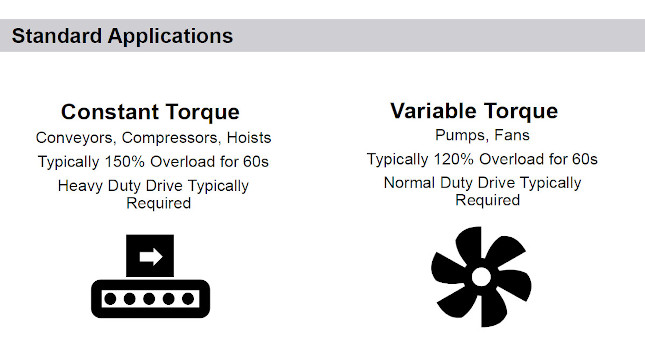
When specifying an adjustable speed drive (ASD) – also known as a variable-frequency drive (VFD), variable-speed drive (VSD), and/or inverter – first look at the application of the motor with which the ASD is to be used. Constant torque applications, such as conveyors, lifting equipment, compressors, or crushers, among others, usually specify a severe-duty or heavy-duty drive. In variable torque applications, which include centrifugal fans and pumps, a normal duty drive will suffice.
Severe duty drives often have a current overload rating of 150% for two minutes and can run continuously at 115% current. Drives with a heavy-duty rating have a current overload of 150% for one minute and can run at 100% current continuously. Normal duty drives are robust enough for fans and pumps since they have a current overload rating of 120% for one minute and can also run at 100% current continuously.
Confirm motor and drive ratings
After matching a drive’s duty with its motor application, one must always confirm the motor full load amps rating and ensure it is less than or equal to the drive’s full load amps rating. Drives are current-rated devices and should be sized by the full load amperage and voltage rating, not by horsepower. It is recommended to not use the motor’s service factor when sizing the drive full load amps with the motor nameplate.
Fortunately, in today’s marketplace, general-purpose drives will include both a heavy and normal duty rating in a single-drive unit. For example, a single drive will be rated 20 hp, heavy duty, with 150% overload, and also rated 25 hp, normal duty, with 120% overload. Therefore, it will contain two full load amp ratings. An example would be a 460-V drive with a nameplate reading “20HP HD/25HP ND” and “31.7A HD/39.2A ND.” Drive programming allows users to specify whether the drive is in normal or heavy-duty mode, choosing its amp and overload rating.
ASD, VFD, VSD, inverter industrial network communications
As the Industrial Internet of Things (IIoT) and control systems have become more advanced, ASDs have followed. These same general-purpose drives will often include built-in communication protocols, such as EtherNet/IP (from ODVA), Modbus TCP, and/or Modbus RTU from Modbus Organization Inc., as more specifications require them. Most drive manufacturers also offer add-on option cards for many additional communication protocols like Profibus from PI North America or DeviceNet (ODVA). Drives with EtherNet/IP capabilities also will offer embedded web servers and will be able use ASD software on a laptop or tablet. This allows for simpler commissioning and real-time data monitoring.
Once a drive is chosen and ready to be installed, the best practice is to prepare before commissioning by knowing how the drive will be controlled beforehand. This saves a lot of programming time. Most drives require a method of starting and stopping. Common methods include starting and stopping via the keypad, the terminal strip with digital inputs, or communication networks, like EtherNet/IP. In addition, they require a speed control method, also usually set via the keypad, terminal strip with analog or digital inputs, or communications such as Modbus TCP.
In the end, matching the drive with the motor’s application and knowing the control methods will lead to a more efficiently run drive-motor system.
Joshua Jagnanan is senior application engineer, low voltage adjustable speed drives, with the motors and drives division of Toshiba International Corp. Edited by Mark T. Hoske, content manager, Control Engineering, CFE Media and Technology, [email protected].
MORE ANSWERS
KEYWORDS: Motor-drive matching, ASD, VFD, VSD
CONSIDER THIS
Who needs a tutorial on motor-drive sizing, matching and selection?
ONLINE
If reading from the digital edition, click on the headline for more resources.
Three training courses: Motors and Drives Best Practices, Savings, Optimization