Should shaft encoders or bearingless encoders be used? Should capacitive, magnetic, or inductive encoder sensors be used? Where should design engineers deploy each encoder type and why?
When design engineers imagine an encoder, they are usually thinking about shaft encoders. Typically, these look like a small can with a shaft poking from one end–turn the shaft and the encoder outputs an electrical signal according to the angle or change of angle. Inside most shaft encoders, there is an opto-sensor and a grating attached to the shaft. As the shaft rotates, the grating interrupts the sensor’s light path and an electrical pulse is produced. This is pretty straightforward, especially when measuring modest accuracies in benign conditions.
However, when measuring angles to <1o accuracy in a tough or outdoors environment, these encoders may not be the best choice. Optical sensors are not robust and do not like temperature extremes. Foreign matter and rough treatment in terms of impact or shock also can pose problems.
Sensors used inside encoders
One option is to use a shaft encoder based on different sensing technologies. Options include capacitive, magnetic, or inductive techniques. Unfortunately, capacitive sensors are as unreliable in harsh environments as optical devices. Magnetic sensors can work well in tough conditions, but have limited measurement performance and are susceptible to dc fields. Inductive encoders–or incoders–are a more recent phenomenon but are increasingly being used as an alternative to traditional inductive devices such as resolvers or rotationally variable differential transformers (RVDTs). Resolvers and RVDTs have been the traditional choice in applications where reliability is vital, such as heavy industry, aerospace, defense, and medical. Incoders use the same basic physics as resolvers and offer similar levels of reliability and performance.
Inductive shaft encoders are more compact than their optical counterparts and, as well as being tougher, also offer shorter axial length.
Inside a shaft encoder, the shaft rotates in a bearing arrangement. The bearings usually are small and not designed for any significant load. This means the shaft to which the encoder connects must be aligned along its axis so it doesn’t fight against the encoder’s own bearings. If there is misalignment, it is likely the encoder’s bearings won’t last long.
If installation tolerances are loose for an application, one trick is to use a flexible shaft coupling to minimize the effect of misalignment. Flexible couplings work well, but are not recommended when measuring angle to high accuracy. This is because angular displacement of the main shaft does not necessarily result in the same angular displacement of the encoder’s shaft. This results in “lost motion” or hysteresis and, in turn, measurement inaccuracy.
Bearingless encoders
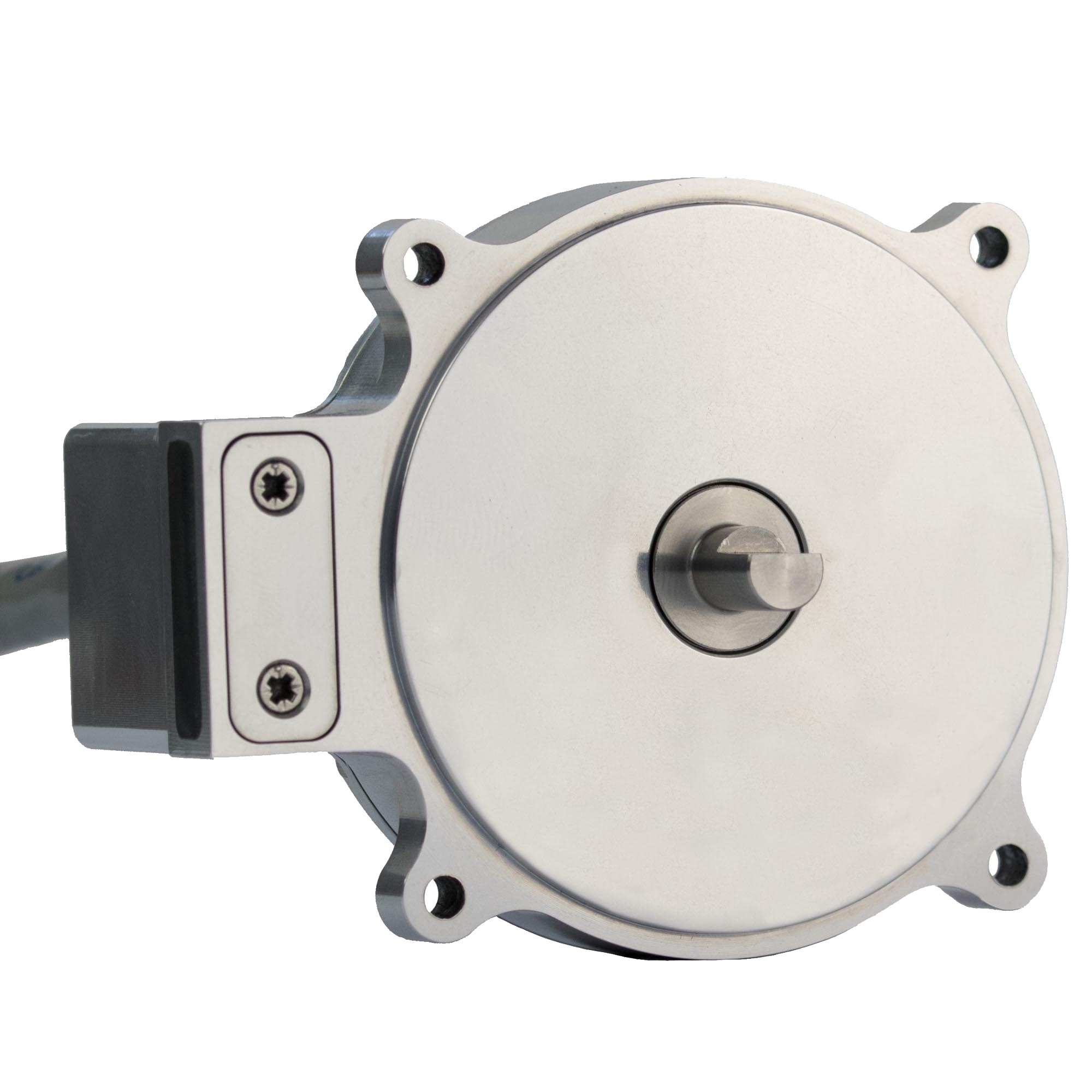
Use of a bearingless encoder can also can help avoid alignment problems. This relies on the host system’s bearings rather than the encoder’s bearings. Bearingless encoders typically come in two parts: a stator and a rotor. Typically, the stator has an electrical connection (for power supply and data output) and so the stator is usually fastened to the host system’s main chassis with the rotor fastened to the rotating element.
As with shaft encoders, various sensing technologies are used; optical is the most common. Similarly, there can be problems with bearingless optical encoders—more often called ring encoders—if the operating environment is anything other than clean, stable, and carefully installed. Typically, an optical ring encoder features a stationary read head and a rotating optical disc. If measurement accuracies are <1°, then the installation tolerances of the optical disc relative to the read head needs careful consideration. With high-accuracy ring encoders, the tolerances required to achieve the headline measurement performance are only stated in the data sheet’s small print. Installation eccentricities of <0.025 mm are not uncommon for some optical ring encoders.
Alternative approaches include inductive ring encoders, which work reliably in extreme temperatures and can be covered in dirt. They also are more tolerant to installation misalignment since their basic physics uses the planar faces of the stator and rotor rather than the point measurement of a single optical read head. Such inductive ring encoders are increasingly preferred over the more traditional “pancake” or “slab” resolvers.
Size and shape are the biggest reasons to use a bearingless encoder. Shaft encoders are compact and, although they are available in through shaft (or hollow shaft) designs, they are rare and expensive when the through bore needs to be bigger than 50 mm.
This is where bearingless encoders are useful to a machine designer because the form factor is well-suited to arrangements where low axial height and/or a large bore are needed. The large bore enables cables, piping, or mechanical elements to pass through the middle of the encoder.
Encoder needs vary
As with many aspects of equipment design, it is often the case one encoder sensing technique is not necessarily better than the other.
Mark Howard is general manager at, Zettlex, U.K. Edited by Mark T. Hoske, content manager, Control Engineering, CFE Media, [email protected], from a Control Engineering Europe, April 29, 2018, article, “Which encoder?”
KEYWORDS: Encoders, encoder sensors
Bearingless and shaft encoders are each suited to different design approaches.
Shaft encoders are compact and easy to deploy.
Bearingless encoders remove the need for bearing alignment and suit designs where low axial height and big a bore are required.
Consider this
Higher reliability application may require a different encoder technology to avoid premature maintenance.
For more automation education, see CFE Edu online courses.
And webcasts at www.controleng.com/webcasts.
See other international coverage at www.controleng.com/international