Deadtime is the interval between the application of a control effort and its first discernible effect on the process variable. Deadtime is most common in processes that involve a transport delay between the actuators and the sensors, such as water flowing through a bathroom's plumbing from the hot water valve to the shower head.
Deadtime is the interval between the application of a control effort and its first discernible effect on the process variable. Deadtime is most common in processes that involve a transport delay between the actuators and the sensors, such as water flowing through a bathroom’s plumbing from the hot water valve to the shower head. Increasing the flow rate through the pipe will have no effect on the shower temperature until the hot water has traversed the length of the pipe.
In this familiar control system, a bather manipulates the shower temperature by adjusting the hot water valve. But because the hot water must traverse distance D to reach his skin, the bather cannot change the shower temperature instantaneously. The deadtime must elapse before a change in the flow rate can cause even the slightest change in the shower temperature. The bather must be patient when manipulating unfamiliar valves or sufficiently experienced to know in advance just how far a valve should be opened to achieve the desired results.
Using bathers as a deadtime controller
Bathers serve as the controller for such a process. They sense the temperature of the shower water and manipulate the hot water valve as necessary to meet comfort objectives. Bathers try to achieve the desired water temperature as quickly as possible, but must wait until the deadtime has elapsed before their control efforts can have the desired effect.
Deadtime is a particularly difficult problem to overcome because there’s nothing a controller can do to affect the process variable any faster than deadtime allows. A controller that expects to see immediate results from its previous control efforts will inevitably conclude that those efforts were ineffective. It will continue to make ever more aggressive control moves until the process variable begins to change.
By then, it will be too late. All control moves applied to that point will have already had a cumulative effect on the process, often doing more harm than good. In the shower example, an impatient bather could end up being scalded.
De-tuning to correct deadtime
Dealing with deadtime requires the controller be either patient or prescient. The controller can make its control moves very slowly and wait for the results of each to become apparent, or if it has advanced knowledge of how the process behaves, it can make control moves that it knows will eventually produce the desired effect.
A proportional-integral-derivative (PID) controller can be endowed with patience by selecting relatively small tuning parameters that limit the magnitude of the controller’s efforts. The simplest means of doing so is to make the values of tuning parameters inversely proportional to deadtime. This de-tuning strategy has been incorporated into virtually all classical tuning rules, including the famous set proposed by John Ziegler and Nathaniel Nichols in 1942.
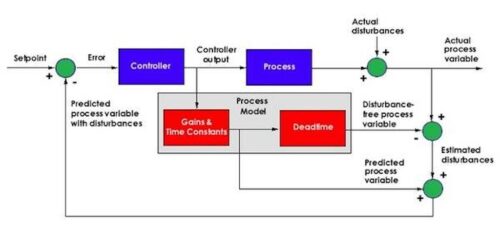
Utilizing a Smith predictor
A somewhat more complicated solution to the deadtime problem was proposed in 1957 by Otto Smith. Mr. Smith demonstrated how a mathematical model of the process could be used to endow the controller with prescience to generate just the right control moves without waiting to see how each move turned out.
In the shower example, this would be equivalent to a bather in his or her home shower. Each would typically know from experience just how far to open the hot water valve to get the shower temperature desired. Once such a well-planned control move has been made, it’s only a matter of time before the desired results appear.
A bather unfamiliar with the shower would have to take a more cautious approach and open the valve slowly like a de-tuned controller. The so-called Smith Predictor approach generally provides better performance than the de-tuning strategy, but is more difficult to implement and requires precise quantitative knowledge of how the process behaves.
This article originally appeared March 1, 2003.