The CAN-FD protocol was first introduced at the 13th international CAN Conference in 2012 and was again the main topic at last year’s 14th iCC in Paris.
At the 13th international CAN Conference in Germany in 2012, Bosch (Germany) introduced the CAN-FD protocol. At last year’s 14th iCC in Paris, CAN FD was again the main topic. This CAN data link layer protocol overcomes two CAN protocol limitations: The data-rate limit of 1 Mbit/s and the 8-byte limit of the data-field length. Using the CANopen application layer on a CAN-FD network allows faster transmissions as well as longer Process Data Objects (PDO) and Emergency messages (EMCY). Using longer data-fields also increases the throughput for software downloads, but this requires new SDO protocols.
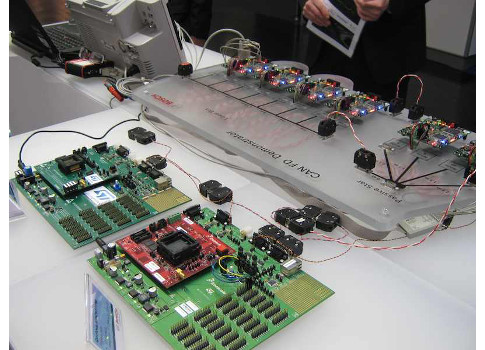
CAN FD has already been submitted for international standardization. At the Embedded World exhibition 2014 in Nuremberg (Germany), Bosch presented its CAN FD demonstrator, which integrates micro-controllers with CAN FD modules from Freescale and ST-Microelectronics. Other chipmakers such as Infineon, Renesas, Spansion, etc. have also launched their CAN FD modules, which are available as samples. Toolmakers and suppliers of interface boards also announced CAN FD support. Bosch’s demonstrator was improved from the year before, with a length of about 70 m and mixed topologies. Besides the bus-line it comprised a passive star similar to the one used in Mercedes cars. The CAN FD network runs at a 500-kbit/s arbitration bit-rate. In the data-phase, the speed was increased to 4 Mbit/s. Of course, this was under laboratory conditions, meaning about 20 °C.
Transceiver supporting higher speeds (4 Mbit/s or 5 Mbit/s) are under development or have been pre-announced. In general, transceivers compliant to ISO 11898-2/5/6 can be used for CAN FD for dataphase bit-rates up to 1 Mbit/s. Last year, NXP was the first company to qualify its Mantis chips for 2-Mbit/s transmission rates. In the meantime Freescale, Microchip, ON Semiconductor, and Texas Instruments have introduced similar products. The main issue is the symmetry of the rising and the falling edges, which requires above 1 Mbit/s. Electromagnetic compatibility (EMC) and electrostatic discharge (ESD) are critical requirements in harsh industrial and automotive environments due to the close proximity of a wide range of networked electronic systems and devices. This means CAN FD compliant transceivers need to meet automotive EMC requirements (± 6 kV ESD and > 36 Bm DPI) without external noise filtering.
When CAN FD and classic CAN controllers are used in the same network, the communication is limited to classic CAN frames. Receiving a CAN FD frame would cause an Error frame transmission by the Classic CAN controllers. Several migration paths from Classical CAN to CAN FD have been discussed at the last two international CAN Conferences. At the CAN FD Tech Day in Tokio, NXP presented an idea on how to run Classic CAN controllers in a CAN FD network. It is based on a transceiver able to filter CAN FD messages and also the Error frames caused by the Classic CAN chip.
CiA plans to set-up interoperability test systems for CAN FD soon. The nonprofit association will provide different network topologies (bus-line and star) and test if CAN FD nodes can communicate correctly without causing error frames. Within ISO the CAN FD protocol is in the progress of being standardized. The C & S Group is preparing a CAN FD conformance test plan and its implementation. Several CiA task forces specify or recommend the usage of CAN FD networks.
Experts in ISO have been discussing the standardization of the CAN FD protocol for a couple of months. It will be introduced in the next revision of the ISO 11898-1 standard. The reviewed document has already successfully passed the Committee Draft voting. The general concepts of the CAN FD protocol as proposed by Bosch have not been changed. The next step after implementing the received comments, the Draft International Standard will be distributed for balloting.
– Edited by Brittany Merchut, Project Manager, CFE Media, bmerchut(at)cfemedia.com