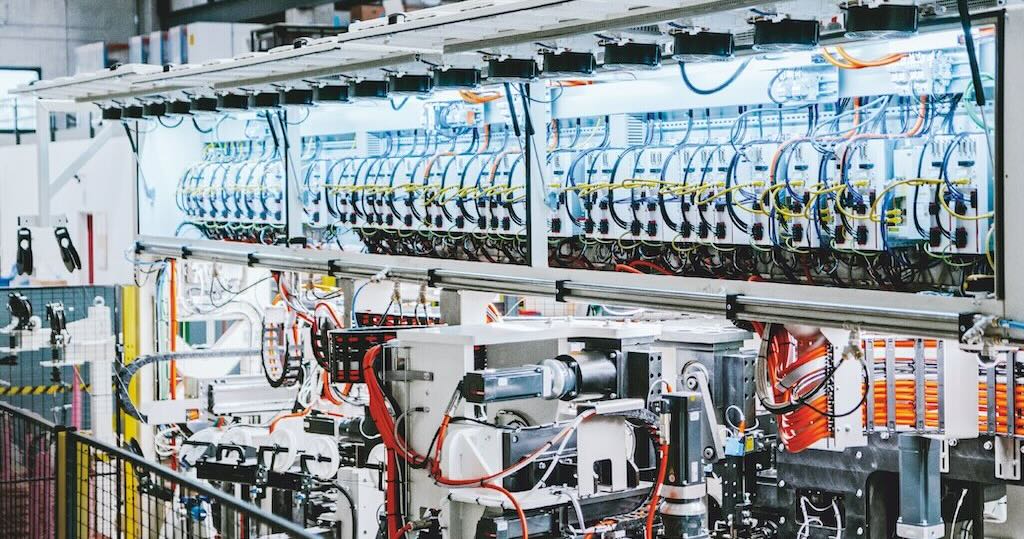
Motors and Drives
Motors transform electrical and magnetic energy to motion and include a wide array of technologies, designs, sizes, form factors and standards for many applications. Drives control the motion of motors and other actuators and can be integrated with the motor or other actuator or stand alone and can exist as a software application in a controller.

Energy Efficiency
More Like This

Energy, Power
More Like This




Power
More Like This

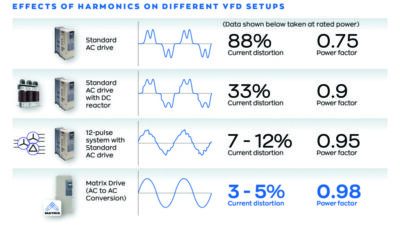
Power Quality
More Like This
Related Products







Motors and Drives Continued